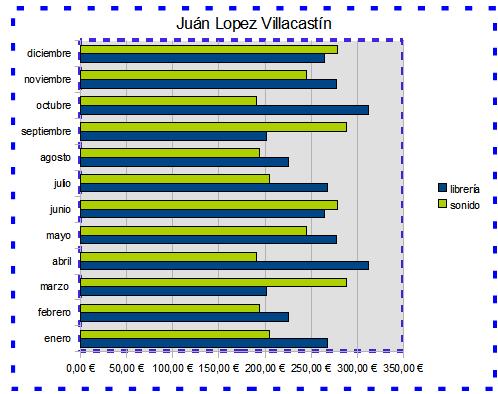
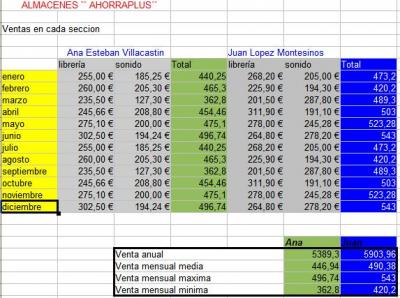
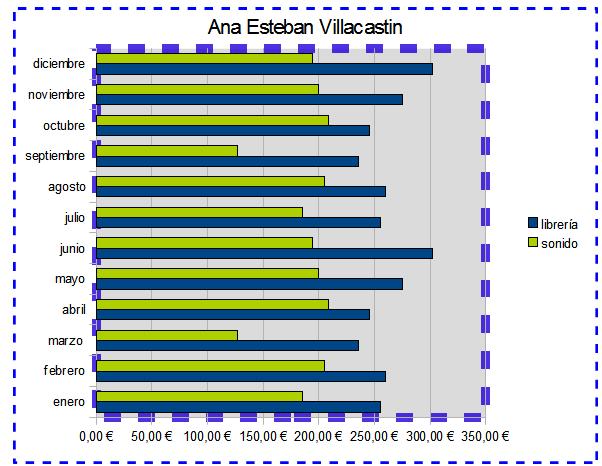
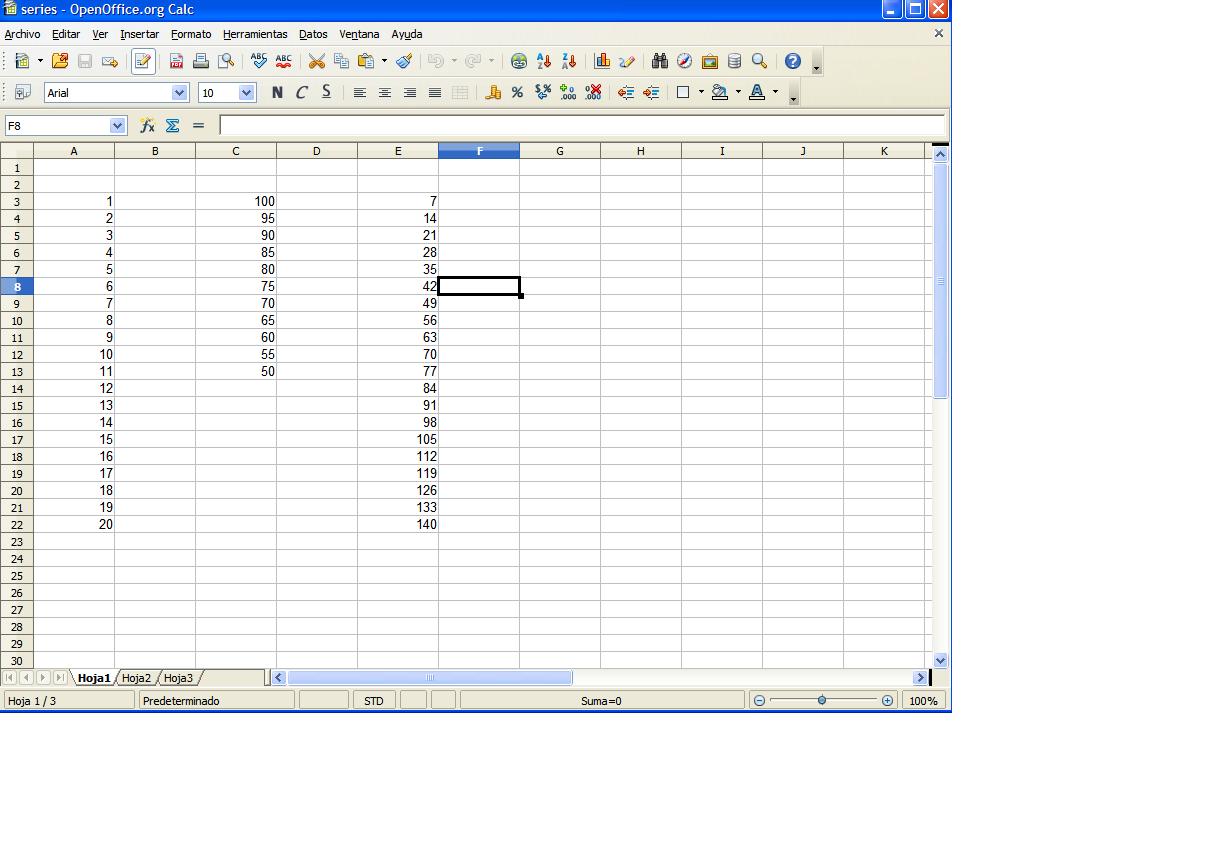
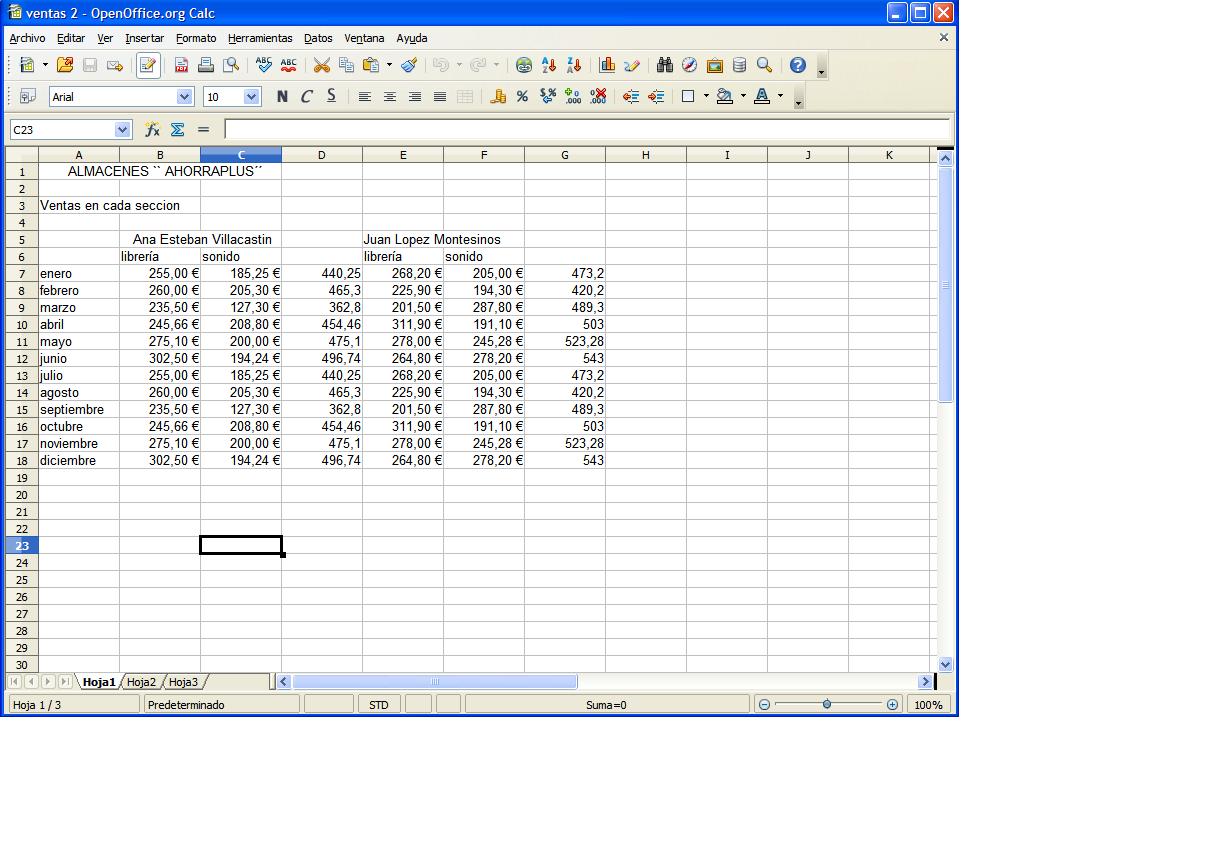
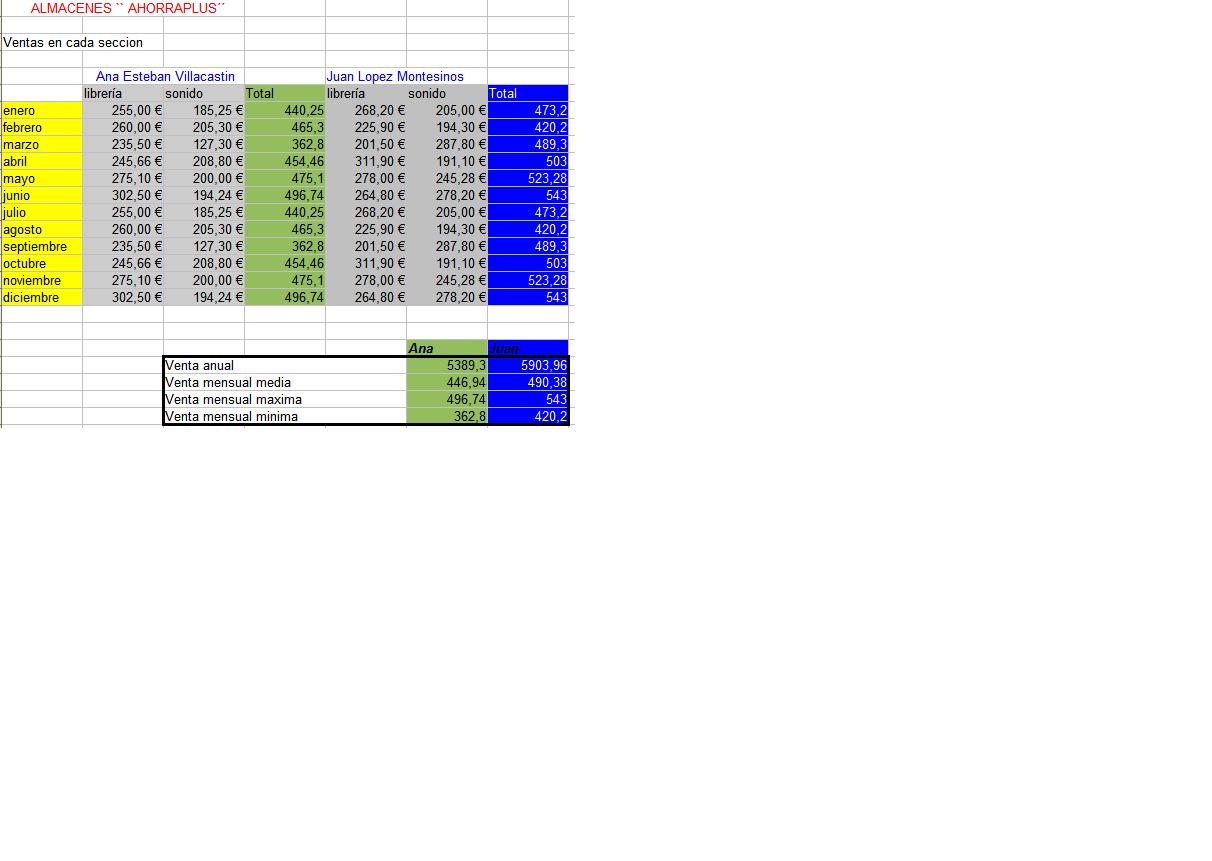
Formato Condicional


IPAD:
El iPad es un dispositivo computacional tipo tablet de Apple Inc. Fue presentado públicamente el 27 de enero de 2010, en una conferencia de prensa en el Yerba Buena Center for the Arts ubicado en San Francisco. Antes de su estreno, surgieron diversos rumores acerca del nombre del dispositivo, dentro de los que se incluyen iSlate e iTablet.

Tras años de rumores, Apple ha presentado finalmente su largamente esperado iPad, un tablet que pretende llenar el hueco existente entre el iPhone y los MacBook a través de una versión hiperdesarrollada del primero que combina lo mejor de ambos diseños: el frontal multitáctil del iPhone con la parte trasera de aluminio de los MacBook.
En lo que a especificaciones técnicas se refiere, el iPad se apoya en un procesador de 1 GHz de velocidad desarrollado por la propia Apple al que han denominado A4 y que ofrece toda la potencia necesaria para ejecutar este iPhone OS con esteroides de forma suave y fluida en una pantalla LED de 9.7 pulgadas de 1024×768 píxeles de resolución (la pantalla utiliza tecnología IPS para ofrecer un mayor ángulo de visión y tiene 132 píxeles por pulgadas). Disponible en capacidades que van desde los 16 a los 64 GB, el iPad cuenta con acelerómetro, brújula, GPS, altavoz, micrófono y conectividad inalámbrica WiFi 802.11n y Bluetooth 2.1+EDR que se amplia con un segundo modelo a la opción 3G.
Físicamente el iPad es realmente delgado. Tan solo 1,32 cm de grosor en el punto máximo (sus bordes son redondeados para que podamos sujetarlo de un modo más cómodo) y un tamaño de 24,28 × 17,87 cm. El peso tampoco es un problema, 680 gramos para la versión estándar y 730 para el modelo con conectividad 3G.
Físicas:


Robótica............................................................................................................2
Mecaización, Automatización y Robotización...............................................2
Robótica y robots.............................................................................................2
Definiciones de robots.................................................................................3
Funcionamiento de un robot......................................................................3
Entradas o sensores................................................................................4
Salidas o actuadores...............................................................................5
Realimentación.......................................................................................5
Robótica:
Una de las principales características que presenta el ser humano es saber aprovechar, en su beneficio, todo lo que le rodea, aunque desgraciadamente esto haya supuesto, en algunos casos, el deterioro del medio ambiente.
En un principio, aprovechó la fuerza animal para realizar ciertas tareas; posteriormente, creó máquinas para realizar aquellos trabajos que requerían un gran esfuerzo físico y aprendió a utilizarlas para automatizar otros muchos que resultaban rutinarios; sin embargo, esto no le bastó. Hace relativamente poco tiempo, y gracias al desarrollo de la informática, ha comenzado a crear otras máquinas, denominadas robots, que permiten ser utilizadas en distintas situaciones o procesos. Por otra parte, también ha comenzado a controlar los dispositivos que diseña; por ejemplo, para hacer más cómodas las viviendas diseña y crea dispositivos que permitan controlar, gracias a la informática, acciones habituales como subir persianas, apagar aparatos electrodomésticos, activar y desactivar sistemas de alarma…, lo que ha originado un nuevo campo de estudio: la domótica.
Mecanización, Automatización y Robotización:
Se entiende por mecanización la incorporación de máquinas para ejecutar determinadas tareas; el propósito no es otro que realizar, de modo mecánico, una serie de acciones que anteriormente se llevaban a cabo de modo manual; el resultado final es una mayor rapidez en el trabajo y una mejor calidad en el resultado.
La automatización consiste en eliminar, de forma parcial o total, la intervención de personas en la ejecución del trabajo; el propósito, en este caso, es el de realizar automáticamente ciertas tareas, sin participación de persona alguna. Las máquinas automáticas pueden repetir continuamente la acción para la que están diseñadas pero sin posibilidad de variar su funcionamiento. Las consecuencias más directas son el aumento de productividad y la realización de tareas desagradables o peligrosas sin participación humana.
La robotización también es una automatización (no intervienen personas) pero, en este caso, las máquinas utilizadas son capaces de realizar diferentes acciones según se las programe; además, serán capaces de captar información de su alrededor y procesarla, para variar posteriormente su acción en función del resultado obtenido.
Robótica y robots:
Los robots ya resultan familiares, ya que se ven con frecuencia en películas, libros, cómics…; sin embargo, hay que tener en cuenta que estos medios de comunicación intentan, en la mayoría de los casos, transmitir una idea humanizada de estos que aún no se corresponde con la realidad.
Según el Diccionario de la Real Academia de la Lengua Española, un robot es un ingenio electrónico que puede ejecutar automáticamente operaciones o movimientos muy varios, y robótica es la técnica que aplica la informática al diseño y empleo de aparatos que, en sustitución de personas, realizan operaciones o trabajos, por lo general, en instalaciones industriales.
De la definición de robot se deduce que éste debe ser capaz de realizar diferentes movimientos y acciones, dando idea de su versatilidad para el trabajo. Sin embargo, de dicha definición no se deduce otra característica importante de los robots; éstos son capaces de captar información del exterior, procesarla y tomar determinadas decisiones mediante un programa informático adecuado.
Por otra parte, de la definición de robótica se deduce que ésta es la técnica con la que se crean y utilizan los robots, y que éstos suelen aplicarse a procesos industriales; sin embargo, esta última afirmación no debe hacer pensar en la limitación de los robots, ya que cada día es más frecuente su utilización en otras muchas actividades diferentes.
La evolución de la robótica está orientada a conseguir robots con mayor movilidad, con sistemas de visión avanzados, con capacidad para entender y reproducir el lenguaje humano, con capacidad para tomar decisiones inteligentes, etc.
Definiciones de robot:
Las distintas definiciones propuestas para robot son muy variadas, y todas ella aportan algún aspecto interesante para comprender y entender su finalidad:
- El Robot Institute America define un robot como un manipulador reprogramable y multifuncional concebido para transportar materiales, piezas, herramientas o sistemas especializados, con movimientos variados y programados, con la finalidad de ejecutar tareas diversas.
- El Oxford Englihs Dictionary afirma que se trata de "un aparato mecánico que se parece y hace el trabajo del ser humano"
Funcionamiento de un robot:
El ordenador es el medio que habitualmente se utiliza para controlar un robot, ya que permite redirigir sus acciones sin necesidad de tener que modificar el propio robot.
El control de un robot suele realizarse mediante un lenguaje de programación que permita indicar a la máquina los movimientos y acciones que debe realizar, así como el modo de procesar la información obtenida del exterior, para que pueda tomar las decisiones (nuevas acciones) en función de los resultados. Los lenguajes de programación empleados pueden ser tanto de bajo nivel (lenguaje máquina o lenguaje ensamblador) como de alto nivel (Basic, C, LOGO…)
Para programar un robot, como para cualquier programa informático, lo primero es desarrollar el algoritmo que permita indicarle qué acción ha de realizar. Posteriormente será necesario elaborar el programa informático que lo manejará mediante las instrucciones o comandos propios del lenguaje utilizado.
La mayoría de los lenguajes de programación están diseñados para realizar aplicaciones de propósito general, por lo que no será necesario utilizar todas sus instrucciones sino sólo un conjunto de ellas: aquéllas que sean necesarias para controlar la entrada y salida de información, y para gobernar las acciones de la propia máquina.
De lo anteriormente expuesto, se deduce que el ordenador debe comunicarse con la máquina (robot) con el fin de tomar y enviar información; para ello, al igual que ocurre con cualquier otro dispositivo externo al ordenador, será necesario disponer de una tarjeta controladora capaz de interpretar las señales recibidas desde el robot y transformar las órdenes enviadas hasta él.
Entradas o Sensores:
Las entradas o sensores son componentes imprescindibles de cualquier robot o sistema de control, ya que gracias a ellos tomará información del exterior.
En el caso de los robots, además de utilizar los sensores para tomar información de su entorno, también suele disponer de una serie de sensores colocados estratégicamente en su estructura, que le permiten detectar cualquier anomalía en su funcionamiento, de manera que pudiera ser corregida inmediatamente.
Existen muchos tipos de sensores, algunos de los cuales se exponen a continuación:
- Sensores que permiten distinguir entre dos estados diferentes: encendido o apagado, existencia o ausencia de luz, etc.
- Sensores para determinar la posición del robot, imprescindible para poder determinar nuevas trayectorias y desplazamientos.
- Sensores para determinar el movimiento del robot, tanto los desplazamientos lineales como los giros.
- Sensores para determinar la velocidad de actuación de las distintas partes móviles.
- Sensores para determinar la distancia del robot a los objetos de su alrededor, imprescindibles para evitar que éste choque con cualquiera de ellos.
- Sensores táctiles, para detectar la forma y el tamaño de los objetos que manipula.
- Sensores para determinar el esfuerzo realizado por la máquina; éstos permiten controlar acciones como, por ejemplo, la presión realizada por la manos del robot sobre cualquier objeto.
Es importante tener presente que la misión de un sensor es sólo captar la información, no la de realizar una acción en función de ésta. El encargado de procesar la información suministrada por todos los sensores de la máquina es el ordenador y, en función del resultado, decidir que acción se ha de realizar.
Salidas o actuadores:
Las salidas o actuadores son los dispositivos que van a permitir que el robot realice las distintas acciones, por lo que le servirán para realizar esfuerzos y movimientos.
Los dispositivos de salida más frecuentes son:
- Motores; permiten mover algunas partes del robot.
- Relés; actúan como interruptores, permitiendo activar o desactivar otros dispositivos conectados a una corriente eléctrica externa con una tensión superior a la suministrada por el ordenador en sus circuitos secundarios , que es aproximadamente de 5 voltios.
- Accionadores hidráulicos y neumáticos; se utilizan para mover algunas de las articulaciones de un robot. La utilización de unos u otros dependerá de la potencia que éste tenga que desarrollar y de la velocidad que necesite para los movimientos. Los accionadores hidráulicos utilizan aceites, por lo que resultan más lentos que los accionadores neumáticos, que utilizan aire; sin embargo, suelen ser menos ruidosos y pueden desarrollar más potencia.
- Electroválvulas; permiten abrir, cerrar o regular el flujo de sistemas hidráulicos.
Realimentación:
Según lo expuesto anteriormente, un robot está constituido, básicamente, por sensores que captan información, por un ordenador que procesa dicha información y toma decisiones, y por los actuadores que ejecutan las decisiones tomadas.
Pero no debe pensarse que estas acciones se ejecutan secuencialmente de forma aislada sino que, por el contrario, se producen simultáneamente en cada instante. Así, durante la ejecución de una acción por parte de los dispositivos de salida correspondientes, los sensores estarán tomando y enviando información al ordenador que, mediante el análisis de ésta, seguirá permitiendo la realización de la tarea o, si fuera necesario, detendría o modificaría la ejecución.
A este proceso en el cual el ordenador está recibiendo y analizando constantemente información, a la vez que realiza las acciones, se le denomina realimentación.
LA TELEVISION EN 3-D SE ACERCA
Ya hay prototipos con pantalla plana y sin gafas. La dstribucion de imagenes holograficas tendra que esperar.
Chema Lapuente
La television del futuro se saldra de la pantalla. Nos mostrara imagenes en tres dimensiones. Según el ingeniero Levent Onural ´´ las pantallas especiales que muestran imagenes en tres dimensiones llegaran a los hogares y a las salaas de cine hacia 2009. Onural es especialista en television tridimensional y esta al frente de un proyecto europeo en esta campo.
Desde hace años investigadores asiaticos, europeos y americanos desarrollan distintos sistemas de television en 3-D que ofrezca una inmersion total en los programas, documentales y peliculas.
Un buen ejemplo es el que hace dos años promovio el Ministerio de Comunicaciones de Japon. Puso en marcha un grupo de trabajo para estudiar la comercializacion de la televsion en 3-D. El objetivo era conseguir las primeras emisiones de imagenes holograficas en 2020.
Un consorcio europeo lleva tres años trabajando en un sistema de TV en 3-D.
Por otra parte, un consorcio europeo patrocinado por la Comision Europea y formado por unos 200 investigadores de siete paises lleva tres años trabajando en el desarrollo de un sistema de television en 3-D sobre pantalla. E ingeniero Levent Onural que trabaja desde Universidad Bilkent, es el fundador de este proyecto. Hace un año Levent desvelo que ya tenia la tecnologia para mostrar imagenes en tres dimensiones y sin gafas. Con esto se referia a mostrar escenas de video que destilan sensacion tridimensional.
Eso si, estos videos se muestran sobre una superficie plana. Muy distinta es la television holografica que proponian los japoneses. Es un sistema que consiste en proyectar imagenes realistas y tridimensionales en el aire. En la holetelevision aparecen figuras, escenarios y objetos en el medio del salon.
Onural explica todo esto en forma muy grafica: pongamos el ejemplo de la retrasmision holgrafica de un partido de futbol. Los espectdadores, en lugar de mirar una pantalla de television convencional, se centraran en una superficie parecida a una mesa de café.
Y, sobre esta mesa, veran en pequeño a unos jugadores compuestos de luz que correran detras del balon. El responsable de este proyecto europeo creee que esto ultimo es viable. Pero aun no contamos con la tecnologia para hacerlo.
Mientras tanto, desde el consorcio estan haciendo pruebas con prototipos de pantallas y proyectores en 3-D. Aquí, el televidente sigue viendo sobre una superficie plana. La unica diferencia es que estas nuevas imagenes trasmiten una sensacion tridimensional impresionante sin que nadie de la audiencia tenga que ponerse gafas especiales.

¿Qué es RSS?
Es un formato XML, cuyo nombre es Rich Site Summary (RSS), que cosnsiste en un estandar de sindicación de contenidos que está pensado para que los sitios que se actualizan con frecuencia puedan enviar automáticamente sus actualizaciones. Gracias al RSS la información queda disponible para ser compartida por otros sitios y puede ser usada por otras webs o programas.
Su funcionamiento es sencillo, existen unos programas llamados lectores o agregadores, que son los encargados de leer estas fuentes RSS que contienen las actualizaciones. Gracias a estos agregadores, en un mismo lugar se recibe toda la información actualizada de los sitios en los que se ha suscrito el usuario, de manera que evita tener que acudir a multitud de páginas para obtener esta información.
FARO DE VIGO, incorpora esta tecnología en su edición digital para facilitar a su lector el acceso a la actualización de las noticias que le son de interés.
Gracias al la tecnología RSS, podrá conocer si se han incluido nuevas noticias en FARO DE VIGO, sin necesidad de entrar en nuestra Web.
¿Qué se necesita?
Añadir los enlaces de las noticas a su lector de RSS o a su página web favorita. Nosotros le proporcionamos los enlaces de suscripción a los portales más populares, simplemente tendrá que hacer clic sobre la imagen  correspondiente para tener las noticias actualizadas en su lector favorito.
correspondiente para tener las noticias actualizadas en su lector favorito.
Modalidades de ensino a distancia na comunidade autonoma de galicia:
Significado de Moodle:
Moodle é un sistema de xestión de cursos de libre distribución (course management system CMS) que axuda aos educadores a crear comunidades de aprendizaxe en liña.
Moodle foi creado por Martin Dougiamas, quen foi administrador de WebCT na Universidade Tecnolóxica de Curtin. Baseou o seu deseño nas ideas do construtivismo en pedagoxía que afirman que o coñecemento constrúese na mente do estudante en troques de ser transmitido sen cambios a partir de libros ou ensinos e na aprendizaxe colaborativo. Un profesor que opera desde este punto de vista crea un ambiente centrado no estudante que lle axuda a construír ese coñecemento con base nas súas habilidades e coñecementos propios en lugar de simplemente publicar e transmitir a información que se considera que os estudantes deben coñecer.

http://www.josedomingo.org/web/mod/resource/view.php?id=263
Un mar de datos: La masa de información producida por la humanidad.
Dos estudios de la Universidad de California han tratado de cuantificar la masa de informacion producida por la humanidad bajo la forma de textos e imágenes.
Tenemos la unidad de medida de la información: el byte, equivalente a un carácter.Cada año se producen 1,5 exabytes de información, el equivalente a 1 500 000 000 000 000 000 bytes, y también el equivalente a 250 libros al año por cada habitante del planeta. Todo en forma de texto escrito e imágenes. Producimos 2700 al segundo. Solo de e-mails producimos un billón al año, y esto equivale a 500 veces el contenido de página web. Si a toda esta información fuera metida en disquetes, obtenríamos una pila que mediaría 4 veces la distancia de la tierra a la luna: ida y vuelta.
Comentario:
Creo que es una gran cantidad de datos e información, lo que quiere decir que las personas se interesan por el intercambio y producción de información.
By jose.
O Castelo de Salvaterra é un castelo medieval situado ao pé do Río Miño, tamén coñecido como Castelo de Dona Urraca. Localízase no concello de Salvaterra de Miño, provincia de Pontevedra nunha atalaia sobre o Miño, no centro do pobo, no lado sur da Praza do Castelo. As súas orixes remontanse aos séculos X e XI. Ocupa unha superficie de 9.700 metros cadrados conformados polo recinto amurallado coas súas garitas, a Casa do Conde, o Pazo de Dona Urraca e a Capela da Virxe da Oliva. Do século XII consérvanse as chamadas Covas de Dona Urraca, coa súa escaleira de caracol. O castelo de Salvaterra e o seu entorno histórico foi declarado en 1949 ben de Interese Cultural
Es una iglesia de estilo renacentista. Su estructura original románica es del siglo XIII pero tres siglos después fue ampliada con claro estilo renacentista. Antaño era la capilla del castillo de Salvaterra, pasando a ser más tarde iglesia parroquial. De origen románico, destaca su fachada con su portada con sus dos columnas, friso y frontón. Por encima del frontón con la figura de San Lorenzo y rematando la fachada principal veremos una espadaña con tres campanas repartidas en dos pisos. En el interior destacar la talla del Santísimo Cristo de la Victoria del año 1733 yel retablo de la capilla mayor de finales del siglo XVII.
La planta de la fortaleza es rectangular y tiene nada más ni nada menos que 9.700 m2. La muralla se conserva en perfectas condiciones gracias a la reciente restauración (2008) por parte del concello. Destaca la capilla central de la Virgen da Oliveira, recuerdo de la ocupación portuguesa en el siglo XVII que los lusos mantuvieron durante dieciseis años. Se sitúa sobre la puerta principal y conserva las marcas de tres escudos que aún conservan la cruz y las coronas simbólicas portuguesas.
Una vez entremos en el recinto amurallado nos llamará la atención la gran explanada que se extiende en el interior al igual que la presencia de pequeñas calles con viviendas dentro de la antigua fortaleza
 Pazo de salvaterra Doña Urraca |  Igrexa de San Lourenzo |  Murallas de salvaterra |
Ejercicio del Libro:
Los campos electromagnéticos en nuestro entorno:
El magnetismo es un fenómeno conocido desde la antigüedad. Algunos
minerales, como la magnetita, son capaces de atraer pequeños trozos de hierro; son
los imanes naturales.
El estudio de los fenómenos magnéticos se limitó, durante mucho tiempo, al de
los imanes, hasta que en 1820, el físico danés Oersted descubrió que las corrientes
eléctricas también producen campos magnéticos.
Siempre que una persona se encuentre cerca de un aparato o instalación que
funcione con energía eléctrica, se hallará sometida a un campo eléctrico y un campo
magnético.
Es muy fácil interponer una pantalla o escudo entre una persona y la fuente que
origina el campo eléctrico. Cualquier estructura sirve. Por ejemplo, en el interior de
una casa que está cerca de una línea de alta tensión, el único campo eléctrico que en
la práctica se puede medir realmente es el que generan los circuitos y aparatos que se
hallan dentro de ella, ya que la estructura de la vivienda actúa de escudo frente al
90% del campo eléctrico generado por la línea.
Por el contrario, no es fácil interponer un apantallamiento eficaz frente a los
campos magnéticos; téngase en cuenta que el campo magnético terrestre atraviesa
toda la Tierra. En otras palabras, no hay forma práctica de aislarse de él.
Puesto que en la sociedad actual se utiliza, cada vez más la energía eléctrica,
mayor es el número de campos electromagnéticos en los que nos vemos inmersos.
Por ahora, los estudios acerca de los efectos que estos campos pueden causar en los
seres vivos no son concluyentes; las investigaciones continúan.
La tabla siguiente muestra los valores de los campos magnéticos creados por algunos electrodomésticos y aparatos eléctricos.
Aparato eléctrico | Campo magnético (μT) | |
Mínimo | Máximo | |
Batidora | 0,50 | 4,80 |
Lavavajillas | 0,50 | 1,20 |
Lavadora | 0,01 | 0,70 |
Microondas | 2,40 | 10,00 |
Vitrocerámica | 0,30 | 3,60 |
Frigorífico | 0,01 | 0,02 |
TV color | 0,40 | 1,20 |
Equipo de música | 0,04 | 0,25 |
Ordenador | 0,04 | 0,12 |
Fluorescente | 0,05 | 0,07 |
Para poder comparar estos valores, lo mejor es representarlos en un diagrama de columnas.

{kind=link}